This lab was done in collaboration with Katarina Duric.
Lab 12: Path Planning and Execution
The goal of this lab was to combine the skills learned in the previous labs to allow the robot to navigate a series of waypoints in a map autonomously.
Setup
There were 9 given waypoints that the robot was supposed to hit.
1. (-4, -3) <--start
2. (-2, -1)
3. (1, -1)
4. (2, -3)
5. (5, -3)
6. (5, -2)
7. (5, 3)
8. (0, 3)
9. (0, 0) <--end
Planning
Our main goal for this lab was to create an entirely closed loop solution. This meant that the robot would have to calculate the distances it would need to drive, and the angles it would need to tuen during the run, rather than having them hard-coded. A working solution could, in theory, be used to drive through a different set of waypoints on a different map only by changing the input map and waypoints.
The solution consists of 5 steps, repeated for all waypoints.
Step 1. Localize
The first step the robot does is run the Lab 11 bayes filter localization code. This allows the robot to have an estimate of where it is on the map, regardless of if previous steps have messed up.
Step 2. Calculate turn angle.
Once the robot has an estimate for its current pose, the robot can then use the localized x and y coordiantes to calculate the angle between its estimated location and the next waypoint in the series.
This is done in jupyter lab with the following python function:
def calcTurnAngle(robotX, robotY, goalX, goalY):
vecX = goalX - robotX
vecY = goalY - robotY
turnAngle = np.arctan2(vecY,vecX)
return turnAngle
Step 3. Turn
Once the angle the robot needs to turn to is calculated, the function PID_TURN_ONCE is called on the robot’s Artemis board, which runs the PID orientation control function developed in Lab 6, turning the robot to point at the waypoint it wants to drive towards.
Step 4. Calculate distance from the wall the robot needs to stop at to arrive at the next waypoint.
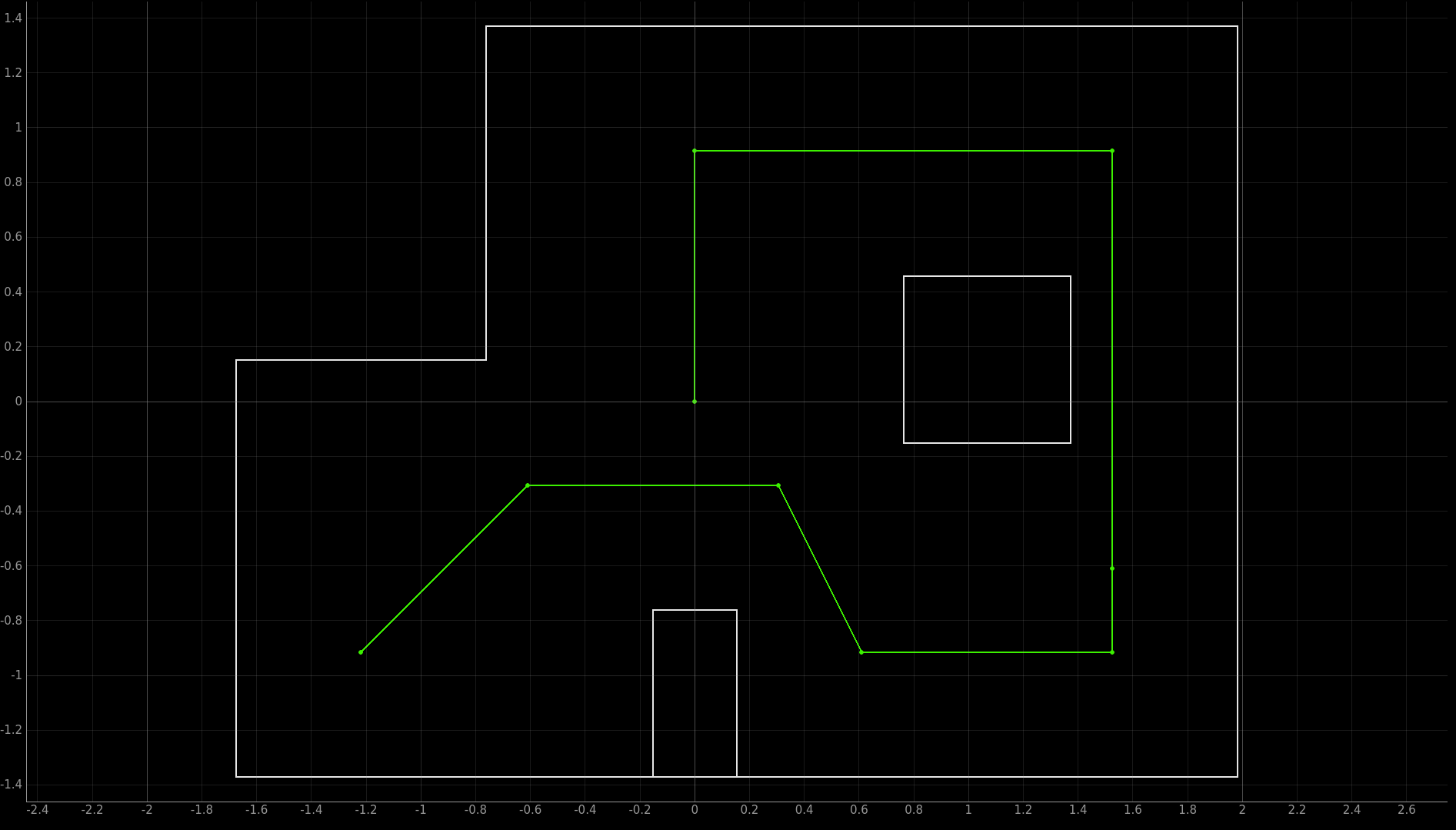
Now that the robot is pointing at the goal waypoint, we want it to drive towards it and stop once it is overtop of it. To do this, we first cast a ray out from the front of the robot and save the nearest point on that ray in which it intersects with on of the walls of the map.
In order to do this, we need a virtual verison of the map that we can use for calculations. This is done by saving each of the walls in a numpy array in the form of [x1, y1, x2 y2]. For the map used in Lab 12, the array looks like this:
map = np.array([
[-1.6764, -1.3716, -1.6764, 0.1524],
[-1.6764, 0.1524, -0.762, 0.1524],
[-0.762, 0.1524, -0.762, 1.3716],
[-0.762, 1.3716, 1.9812, 1.3716],
[1.9812, 1.3716, 1.9812, -1.3716],
[1.9812, -1.3716, -1.6764, -1.3716],
[-0.1524, -1.3716, -0.1524, -0.762],
[-0.1524, -0.762, 0.1524, -0.762],
[0.1524, -0.762, 0.1524, -1.3716],
[0.762, -0.1524, 0.762, 0.4572],
[0.762, 0.4572, 1.3716, 0.4572],
[1.3716, 0.4572, 1.3716, -0.1524],
[1.3716, -0.1524, 0.762, -0.1524]
])
All points are stored in meters.
This map, along with the current estimated robot pose, are input into the function depthPredict, which returns the x and y coordinates of the point on the wall directly in front of the robot.
def depthPredict(robotX, robotY, robotTheta, robot_map):
maxRange = 20
# Define the endpoint of the sensor's line of sight (far away)
xEnd = robotX + maxRange * np.cos(robotTheta)
yEnd = robotY + maxRange * np.sin(robotTheta);
cmdr.plot_odom(xEnd, yEnd)
# Initialize minimum depth to a large value
minDepth = maxRange
minX = 20
minY = 20
# Loop through each wall in the map
for i in range(len(robot_map)):
# Extract wall coordinates
x1 = robot_map[i][0]
y1 = robot_map[i][1]
x2 = robot_map[i][2]
y2 = robot_map[i][3]
# Check for intersection between sensor line and wall
[isect, xInt, yInt] = intersectPoint(robotX, robotY, xEnd, yEnd, x1, y1, x2, y2)
if isect:
# Calculate distance from sensor to intersection point
dist = abs(np.sqrt((xInt - robotX)**2 + (yInt - robotY)**2))
# dist = abs(np.sqrt((xInt - robotX)**2 + (yInt - robotY)**2) * np.cos(robotTheta));
# Update minimum depth if this intersection is closer
if dist < minDepth:
minDepth = dist
minX = xInt
minY = yInt
return minX, minY
The function intersectPoint is used to calculate the points on the wall in which the ray intersects:
def intersectPoint(x1, y1, x2, y2, x3, y3, x4, y4):
x = []
y = []
ua = []
denom = (y4-y3)*(x2-x1)-(x4-x3)*(y2-y1)
if denom == 0:
# if denom = 0, lines are parallel
isect = False
else:
ua = ((x4-x3)*(y1-y3) - (y4-y3)*(x1-x3))/denom
ub = ((x2-x1)*(y1-y3) - (y2-y1)*(x1-x3))/denom
# if (0 <= ua <= 1) and (0 <= ub <= 1), intersection point lies on line
# segments
if ua >= 0 and ub >= 0 and ua <= 1 and ub <= 1:
isect = True
x = x1 + ua*(x2-x1)
y = y1 + ua*(y2-y1)
else:
# else, the intersection point lies where the infinite lines
# intersect, but is not on the line segments
isect = False
return isect, x, y
Because we know that the robot is pointing directly at the next waypoint, we know that the next waypoint lies on the line between the current robot pose and the calculated point on the wall. This means that the distance between the goal waypoint and the point on the wall is the distance from the wall the robot needs to stop at to arrive at the goal waypoint.
This is done in jupyter lab with the following python function:
def calcStopDist(wallX, wallY, goalX, goalY):
stopDist = np.sqrt((wallX-goalX)**2 + (wallY - goalY)**2)
return stopDist*1000 #convert to mm
Step 5.
The stop distance is then sent to the robot, which exectues the linear PID control using kalman filtering developed in Lab 7 to drive towards the wall until the desired distance is met.
Results
Our robot was able to successfully navigate through the map, and at least approximately hit all 9 waypoints.
Waypoint 1: (-4,-3)
Video Timestamps 0:00-0:28
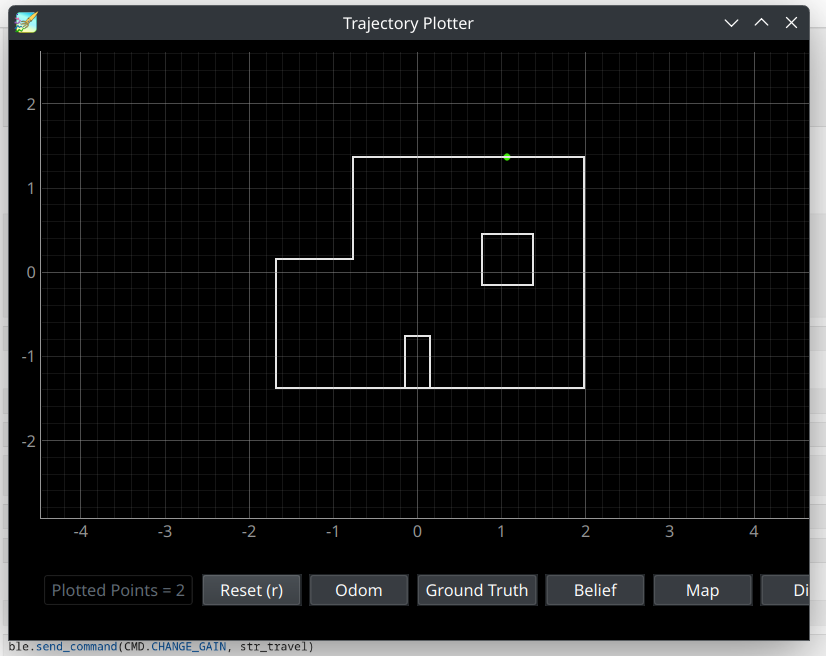
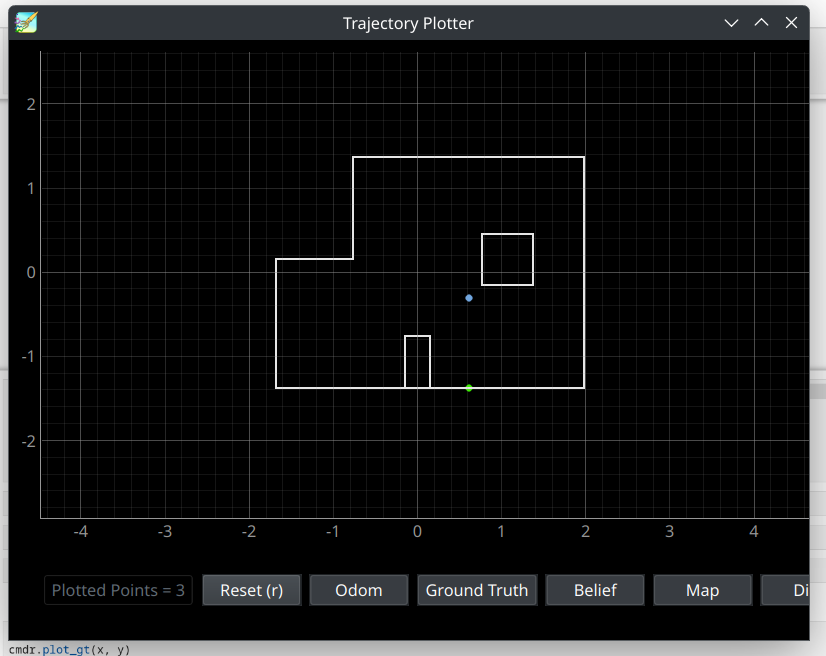
Since the starting waypoint was always the same, for the first waypoint, we skipped the localization step. We started the robot facing the positive X direction of the map, which corresponds to a yaw angle of 0 degrees. The robot then turns 45 degrees to point at waypoint 2, and calculates the point on the wall it needs to drive towards, plotted in green. The robot then drives forward until it reaches the distance from this point that waypoint 2 lies at.
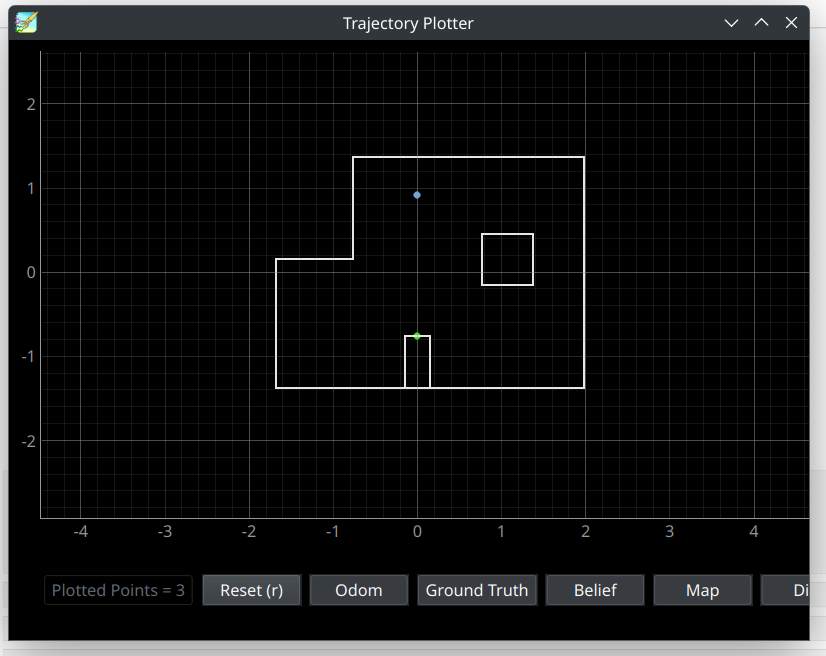
Waypoint 2: (-2, -1)
Video Timestamps 0:28-1:28
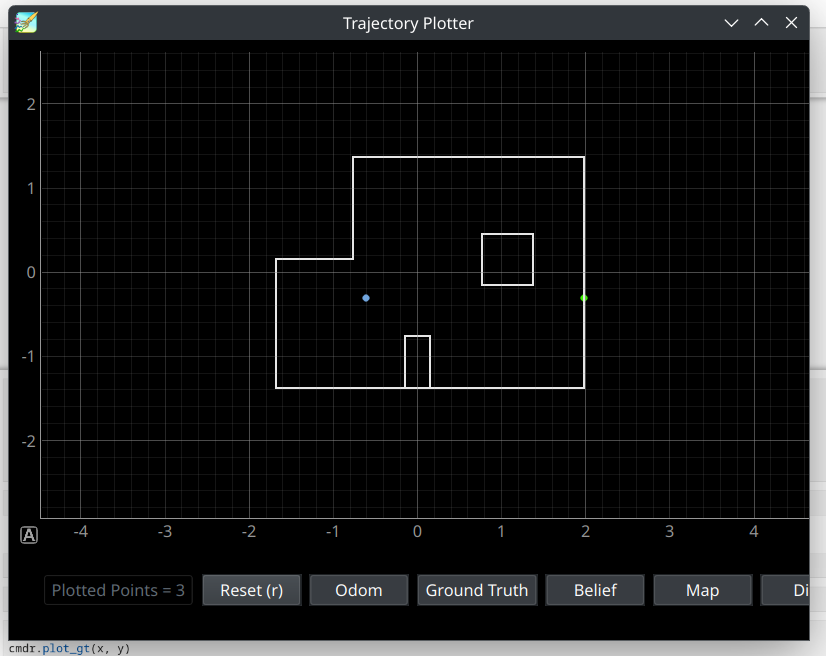

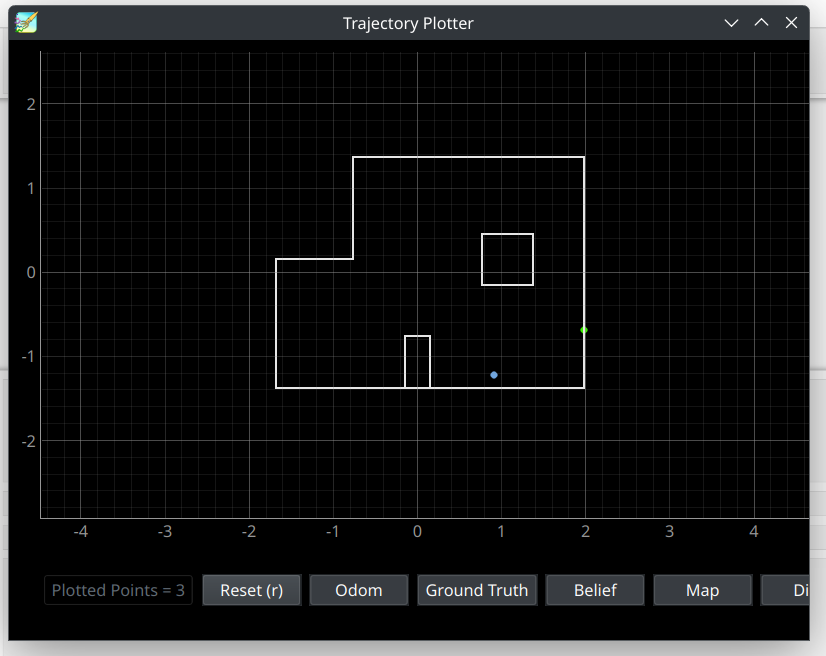
Here the robot did have to localize, in order to confirm it had reached -2,-1. The localized position of the robot is plotted in blue. In reality, the robot had overshot the waypoint slightly, but the localization was close enough not to cause any errors It then repeated the steps done for waypoint 1, and identified that waypoint 3 was directly to the right of it, and plotted the closest point on a wall to the right of the localized position in green.
Waypoint 3: (1, -1)
Video Timestamps 1:28-2:35

The localization for waypoint 3 localized slightly too far in the positive X direction, placing the robot directly above waypoint 4. This meant that the robot thought it had to drive straight down to reach waypoint 4, rather than at the slight angle from vertical it needed to do in reality.
Waypoint 4: (2, -3)
Video Timestamps 2:35-3:25

Due to the slightly incorrect localization for waypoint 3, the robot drove to a point about a foot to the left of the actual waypoint. The robot then localized, and ended up localizing too far to the right of waypoint 4, and slightly too far down. This is likely because the robot localized extremely close to a wall, and so the bayes filter update step had a lot distance measurements of a very close wall, which could have caused a different grid space, that was closer to the wall, become the most likely robot pose.
Waypoint 5: (5, -3)
Video Timestamps 3:35-4:26

Even though the localization for waypoint 4 called for a greater angle than was nessecary, the robot still ended up on the correct tile that corresponded to (5,-3). Again, the bayes filter localized to a point near to, but not exactly, the robot’s actual pose, in this case placing it further in the bottom right corner than the robot actually was. However, the localization was still close enough that the line between it and the next waypoint still points the robot in the correct direction to drive over waypoint 6 on its way to waypoint 7.
Waypoint 6: (5, -2)
Video Timestamps 4:26-4:34
Given that wapoint 6 lay on the line between waypoints 5 and 7, we elected to skip localization and planning for this step. As long as the robot was successfully navigating the surrounding points, it would always drive over this waypoint. Stopping here to localize would have only added an extra point of failure.
Waypoint 7: (5, 3)
Video Timestamps 4:34-5:21

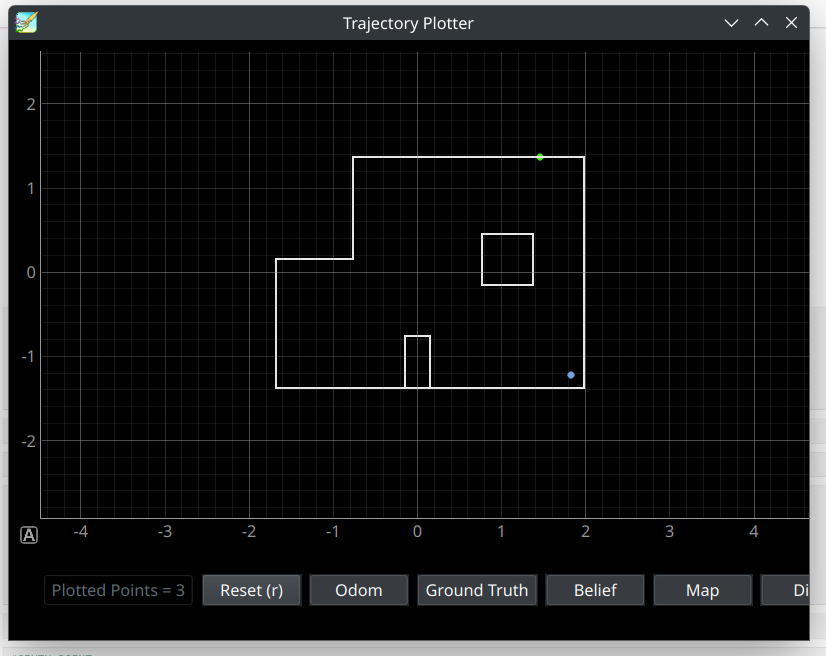
The bayes filter localization for waypoint 7 continues the trend by localizing very close to, but slight to the right of, the actual robot position. However, in this case, the does not need to travel in the y direction, which the localization produced correctly, and so the incorrect angle error from waypoint 3’s slightly off localization is not repeated.
Waypoint 8: (0, 3)
Video Timestamps 5:21-6:38

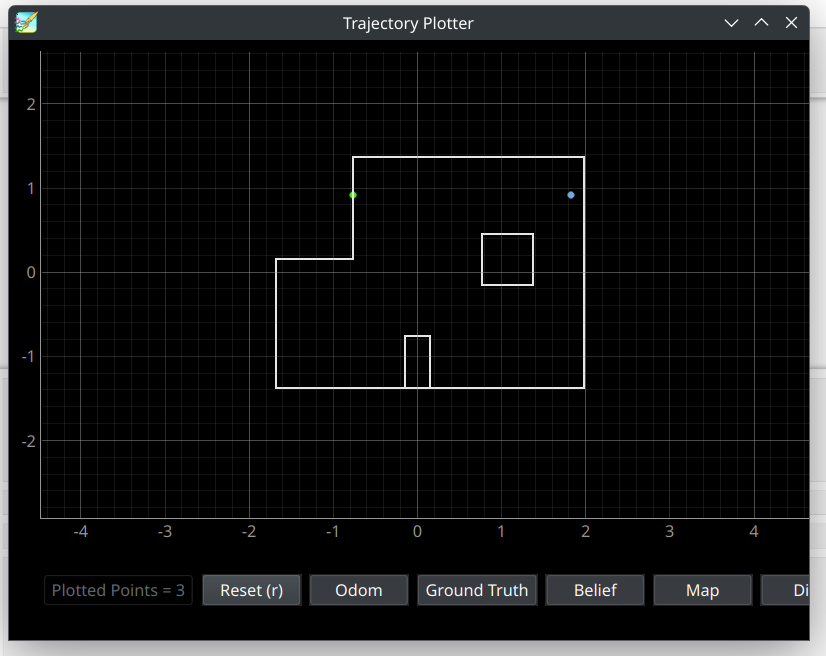
At this point in the run, it appears the robot’s battery is running low, as it has trouble staying in place while localizing and turning, and undershoots waypoint 8 by some distance. The bayes filter localizes it to exactly waypint 8’s position, however, in reality the robot was a bit to the right of it. This caused the drive to the final point to end up slightly to the right of waypoint 9 as well.
Waypoint 9: (0,0)
Video Timestamps 6:38-6:58
There was no need to do any localization and planning for this waypoint, as this was the stop point for the whole path.
Problems and Potential Solutions
The most persistent issue in our successful runs was the localization not being completely accurate. Although it was generally accurate enough to approximate the real location of the robot, it was often times offset by around a foot. We could potentially solve this by increasing the amount of distance sensor measurements used, and increasing the number of grid spaces used in tha bayes filter. This would trade computation time for accuray, but given that the bayes filter calculations are being done on a computer rather than the much less powerfull artemis board, this likely would not drastically increase the time for the robot to navigate.
Discussion
Overall we were very satisfied with the performace of our robot during this lab. We were successfully able to navigate the robot using completely closed-loop control. Combining the localization code with PID control was a nice way to combine everything that we had been taught over the course of the labs in this course.